第一章 搜索问题
深度优先搜索
优先扩展深度深的节点.
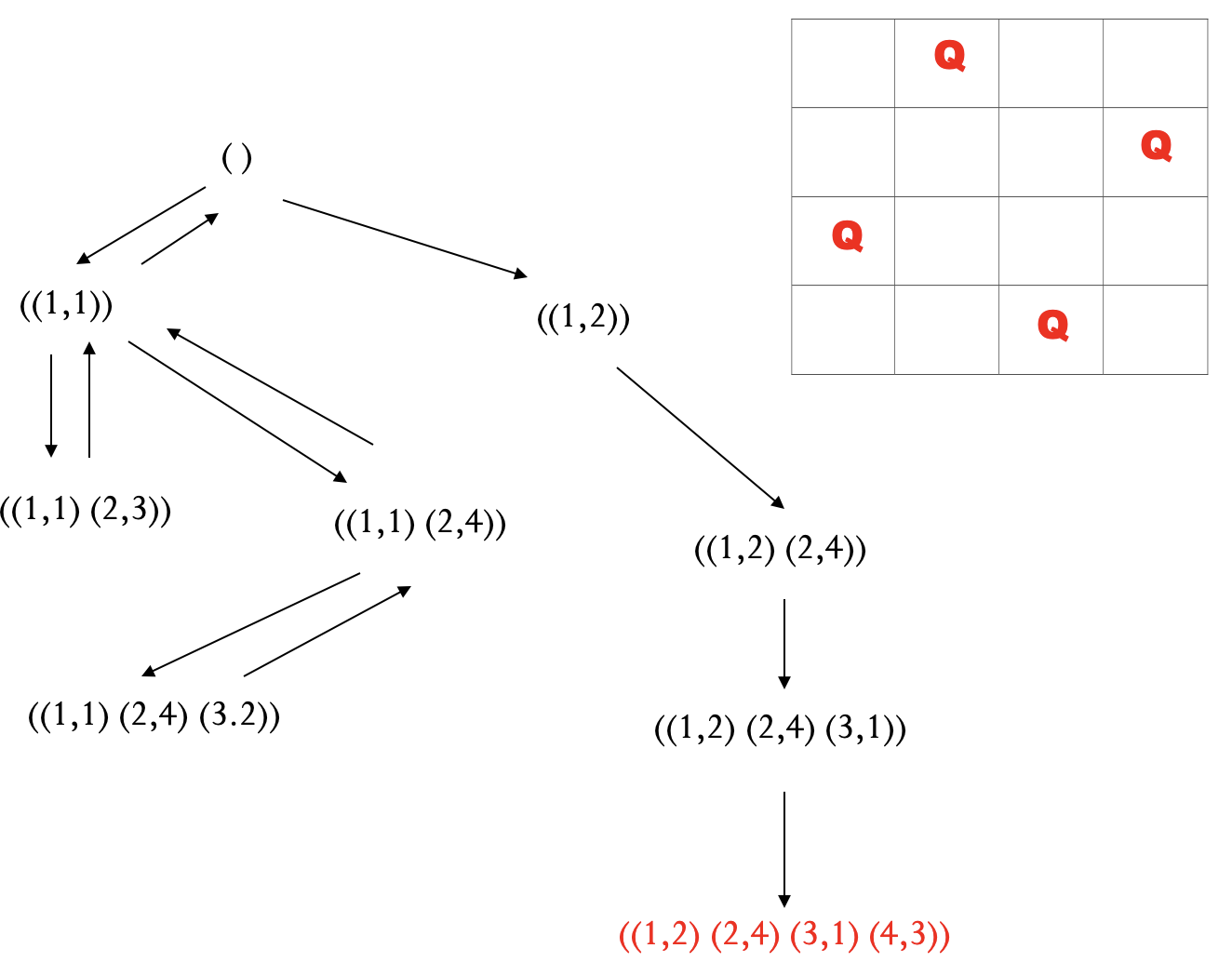
例 皇后问题 (深度优先+回溯).
性质:
- 一般不能保证找到最优解.
- 当深度限制不合理时, 可能找不到解, 可以将算法改为可变深度限制.
- 最坏情况时, 搜索空间等同于穷举.
- 是一个通用的与问题无关的方法.
- 节省内存, 只存储从初始节点到当前节点的路径.
宽度优先搜索
优先扩展深度浅的节点.
性质:
- 当问题有解时, 一定能找到解.
- 当问题为单位耗散值, 且问题有解时, 一定能找到最优解.
- 方法与问题无关, 具有通用性.
- 效率较低, 存储量比较大 (带深度模拟的深度优先搜索).
Dijkstra 算法
宽度优先没有考虑两个节点间的距离.
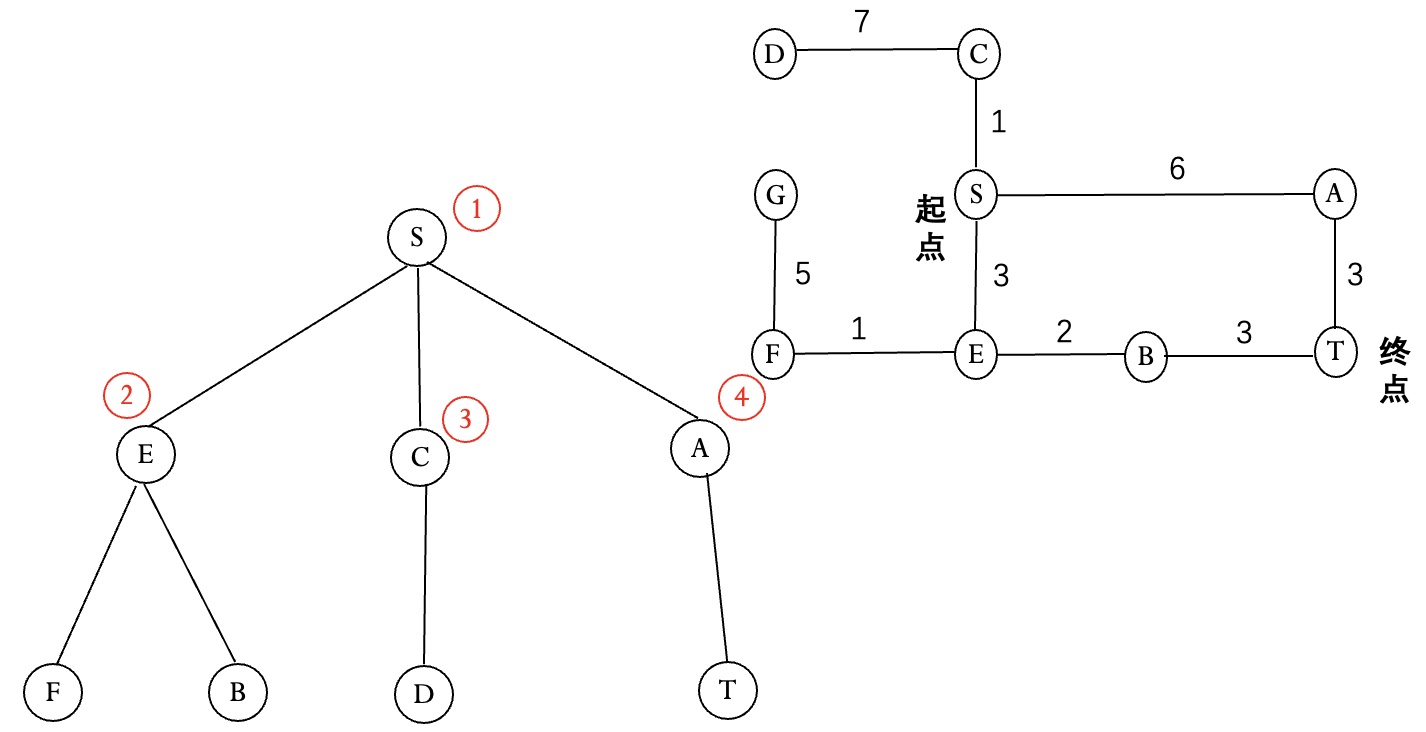
优先扩展距离起点最近的节点, 直到终点距离最短.
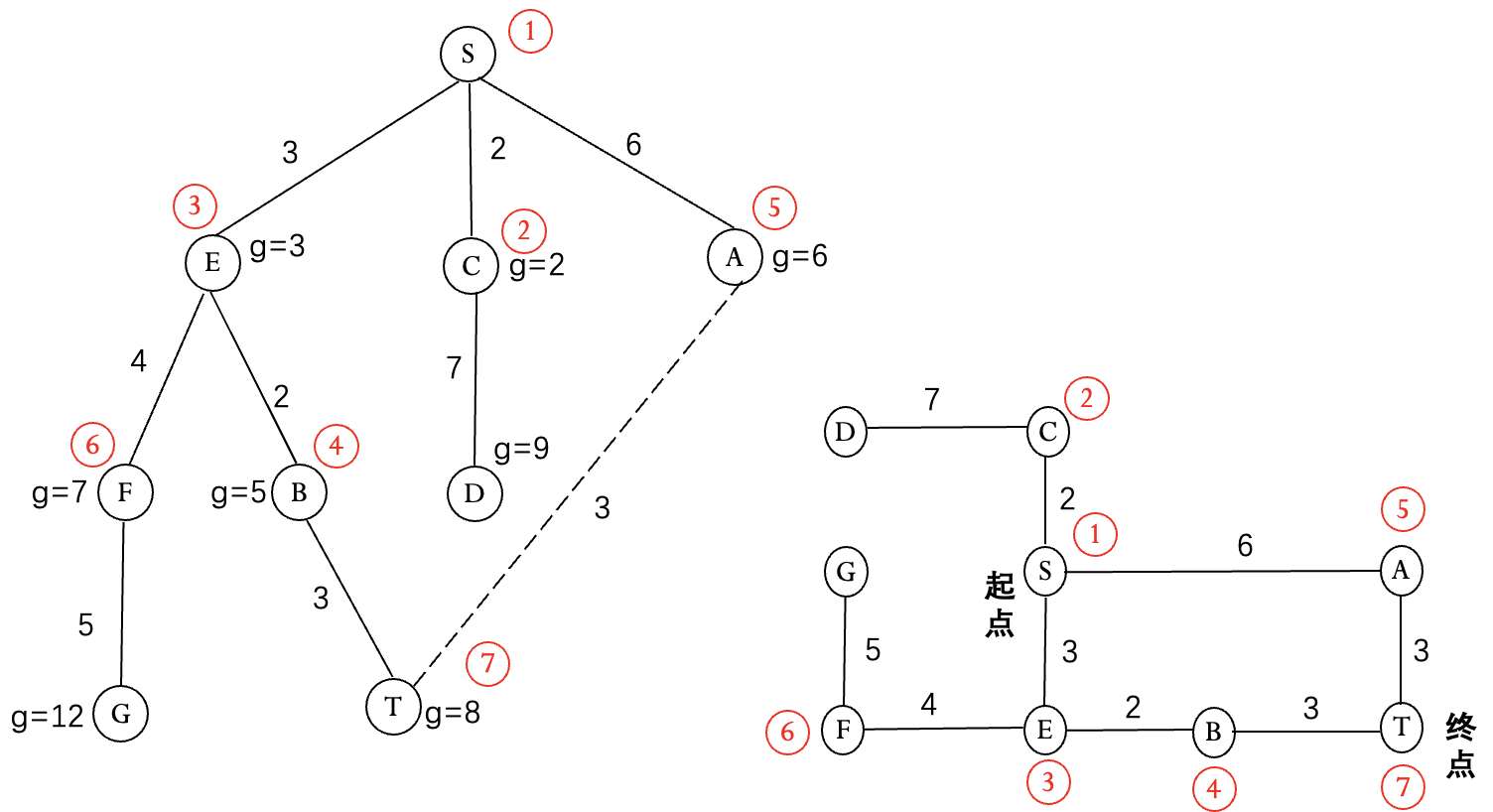
优点: 当问题有解时, 可以找到最佳解.
不足: 只考虑了节点距离起点的距离, 没有考虑节点到终点的距离.
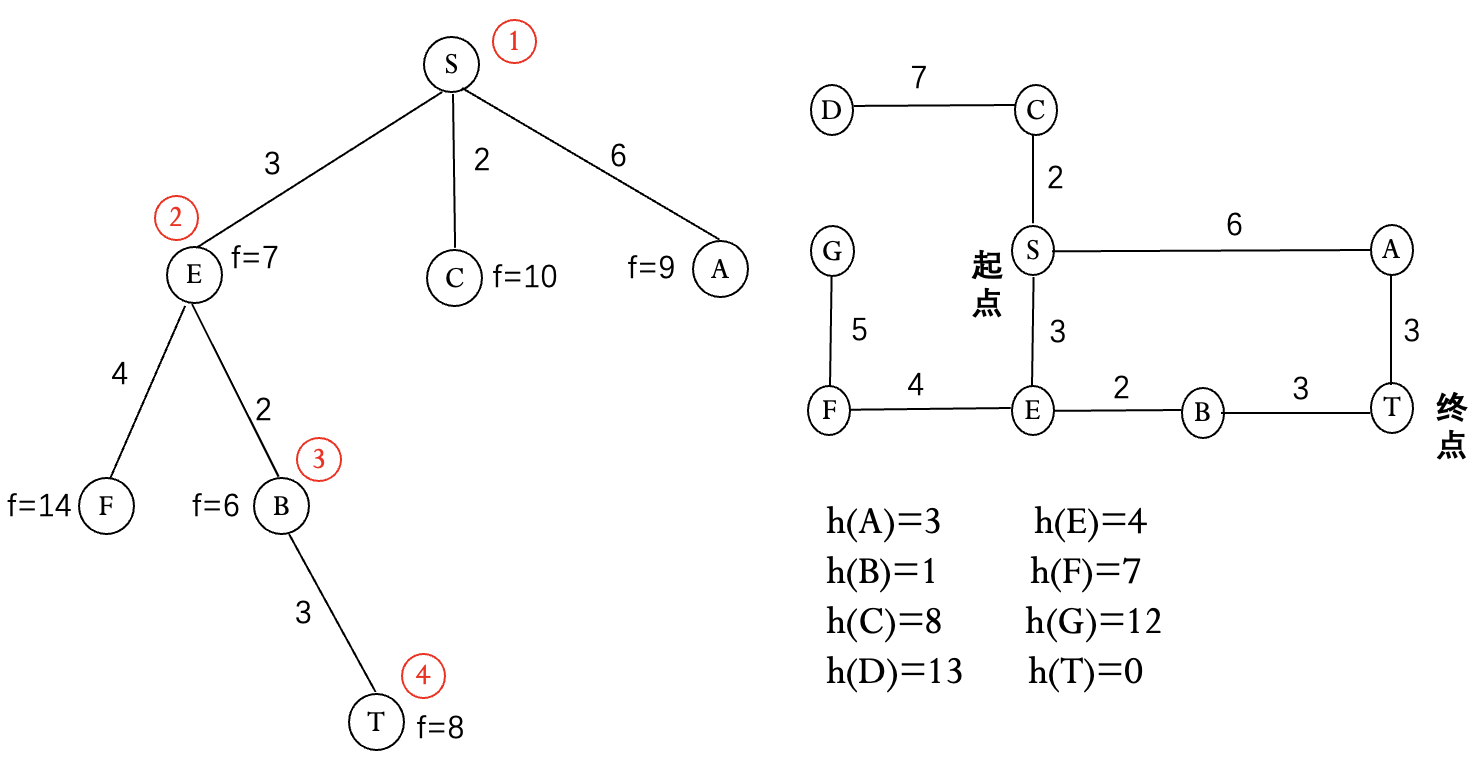
启发式图搜索
引入启发知识, 保证找到最佳解时, 尽可能减少搜索范围, 提高搜索效率.
启发知识: 评估节点到达目标的距离.
启发式搜索算法 A:
$g^*(n)$: 从 $s$ 到 $n$ 的最短路径的耗散值.
$h^*(n)$: 从 $n$ 到 $g$ 的最短路径的耗散值.
$f^*(n)=g^*(n)+h^*(n)$: 从 $s$ 经过 $n$ 到 $g$ 的最短路径的耗散值.
$g(n)$, $h(n)$, $f(n)$ 分别是 $g^*(n)$, $h^*(n)$, $f^*(n)$ 的估计值.
用 $f(n)$ 对待扩展节点进行评价, 优先扩展 $f(n)$ 值最小的节点, 直到 $f(终点)$ 最小.
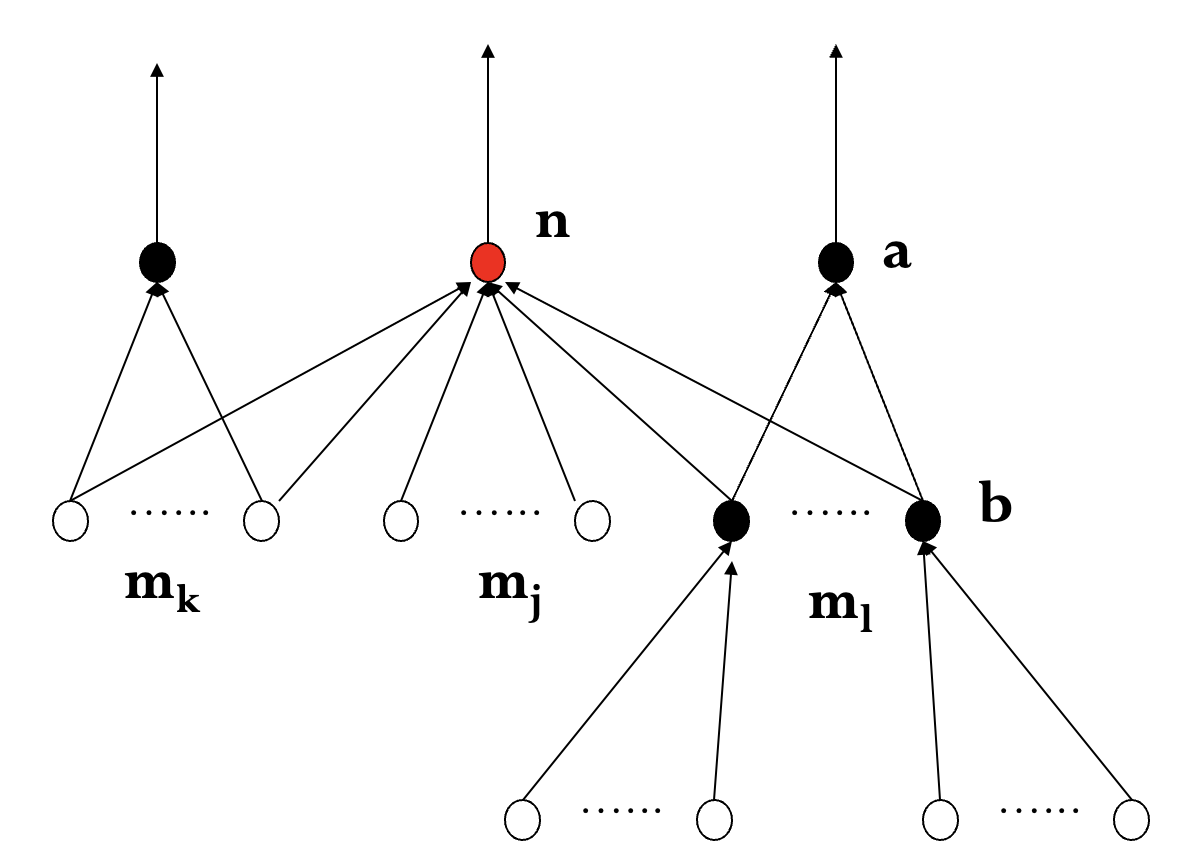
$m_j$: 扩展时第一次生成, 父节点标记为 $n$.
$m_k$: 已生成尚未扩展, 比较 $f(m_k)$, $f(n,m_k)$ 决定是否重标记父节点.
$m_l$: 已生成已扩展, 比较 $f(m_l)$, $f(n,m_l)$ 决定是否重标记父节点, 并重新扩展.
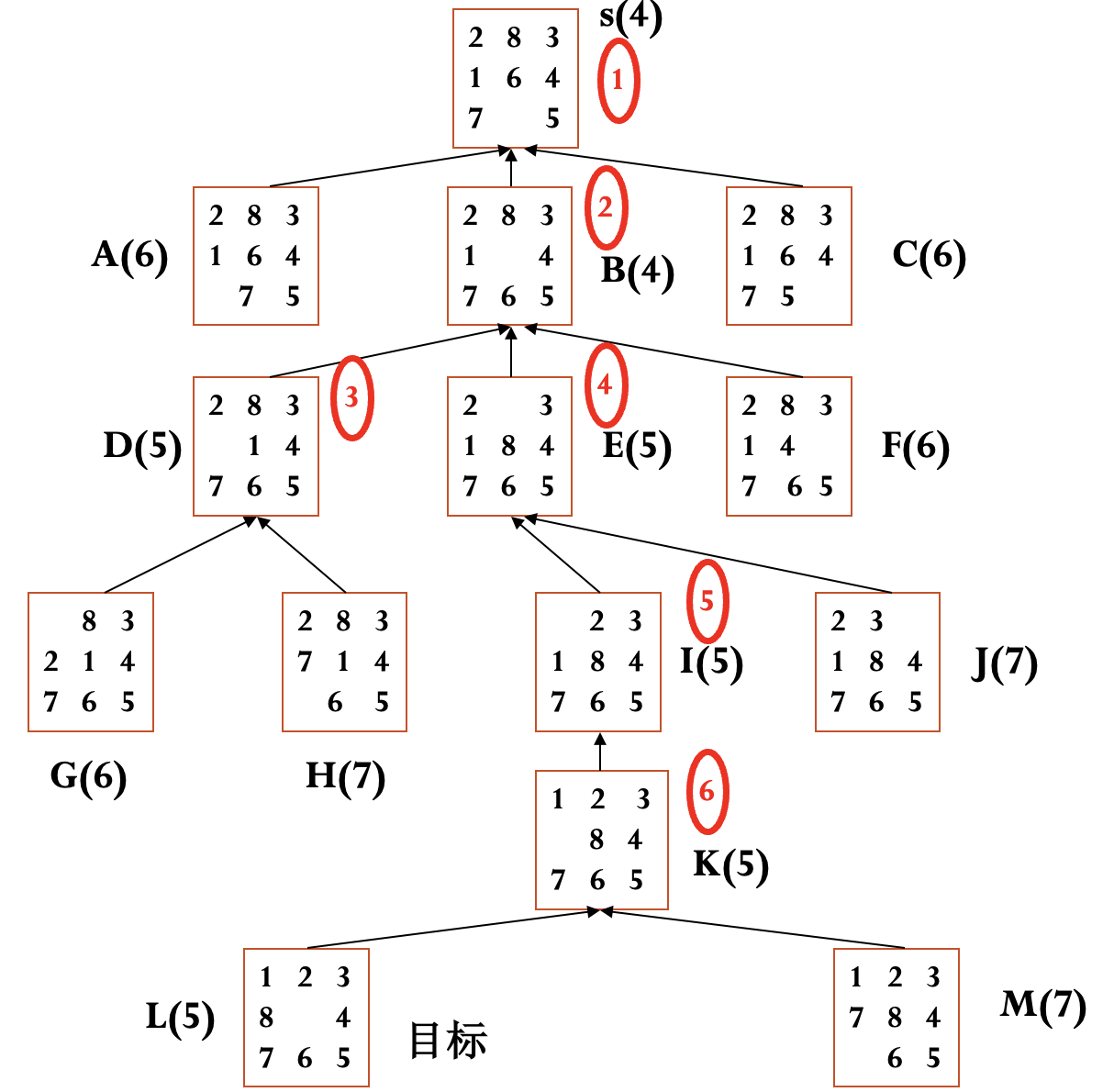
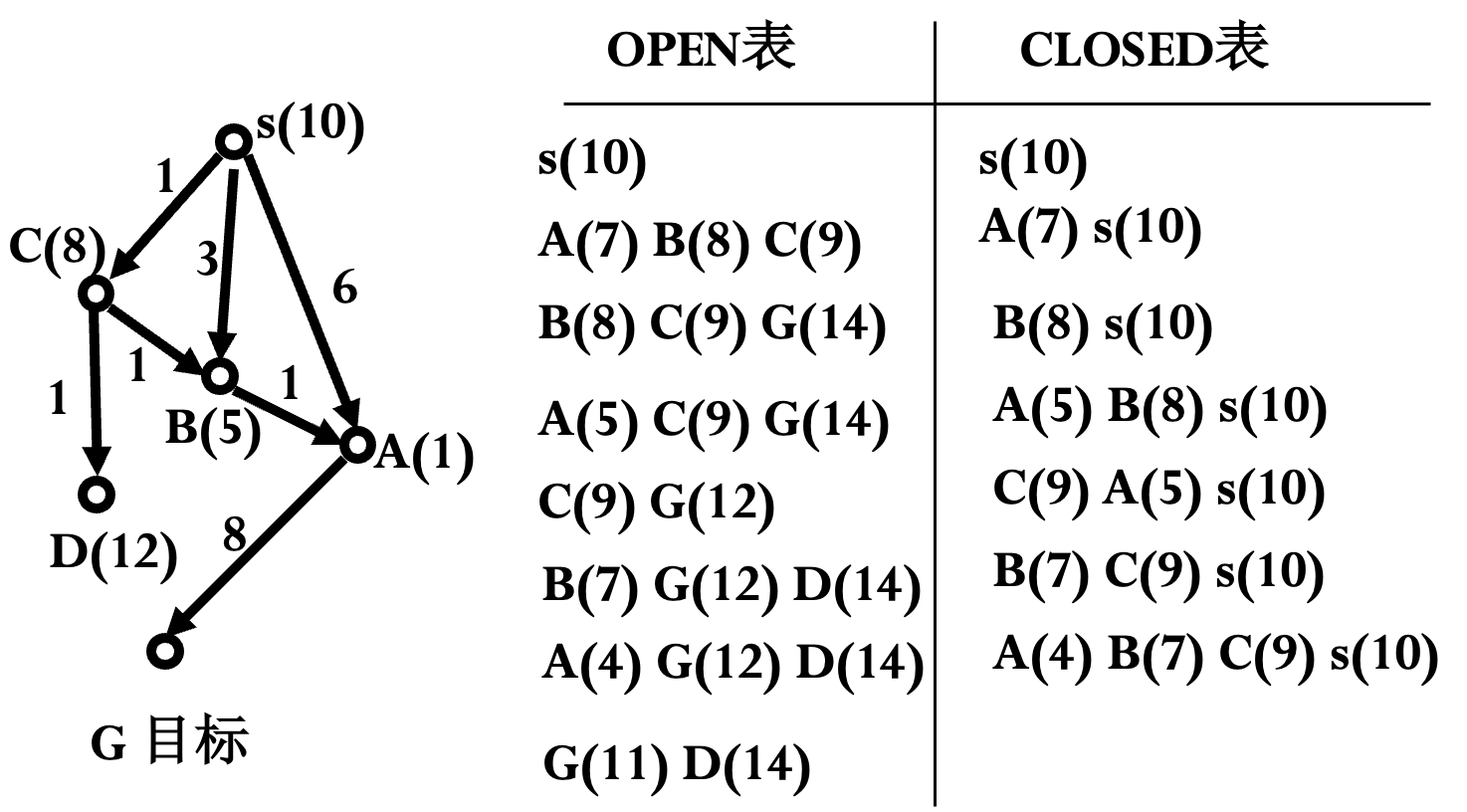
# A-algorithm(s): s 为初始节点 OPEN=(s), CLOSED=(), f(s)=g(s)+h(s); while OPEN 不空 do: begin n=FIRST(OPEN); if GOAL(n) THEN return n; REMOVE(n, OPEN), ADD(n, CLOSED); EXPAND(n)→{m_i}, 计算 f(n, m_i)=g(n, m_i)+h(m_i); ADD(m_j, OPEN), 标记 m_j 到 n 的指针; if f(n, m_k)<f(m_k) then f(m_k)=f(n, m_k), 标记 m_k 到 n 的指针; if f(n, m_l)<f(m_l) then f(m_l)=f(n, m_l), 标记 m_l 到 n 的指针, ADD(m_l, OPEN); OPEN 中的节点按 f 值从小到大排序; end while return FAIL;从目标开始, 顺序访问父节点, 直到初始节点, 得到解路径.
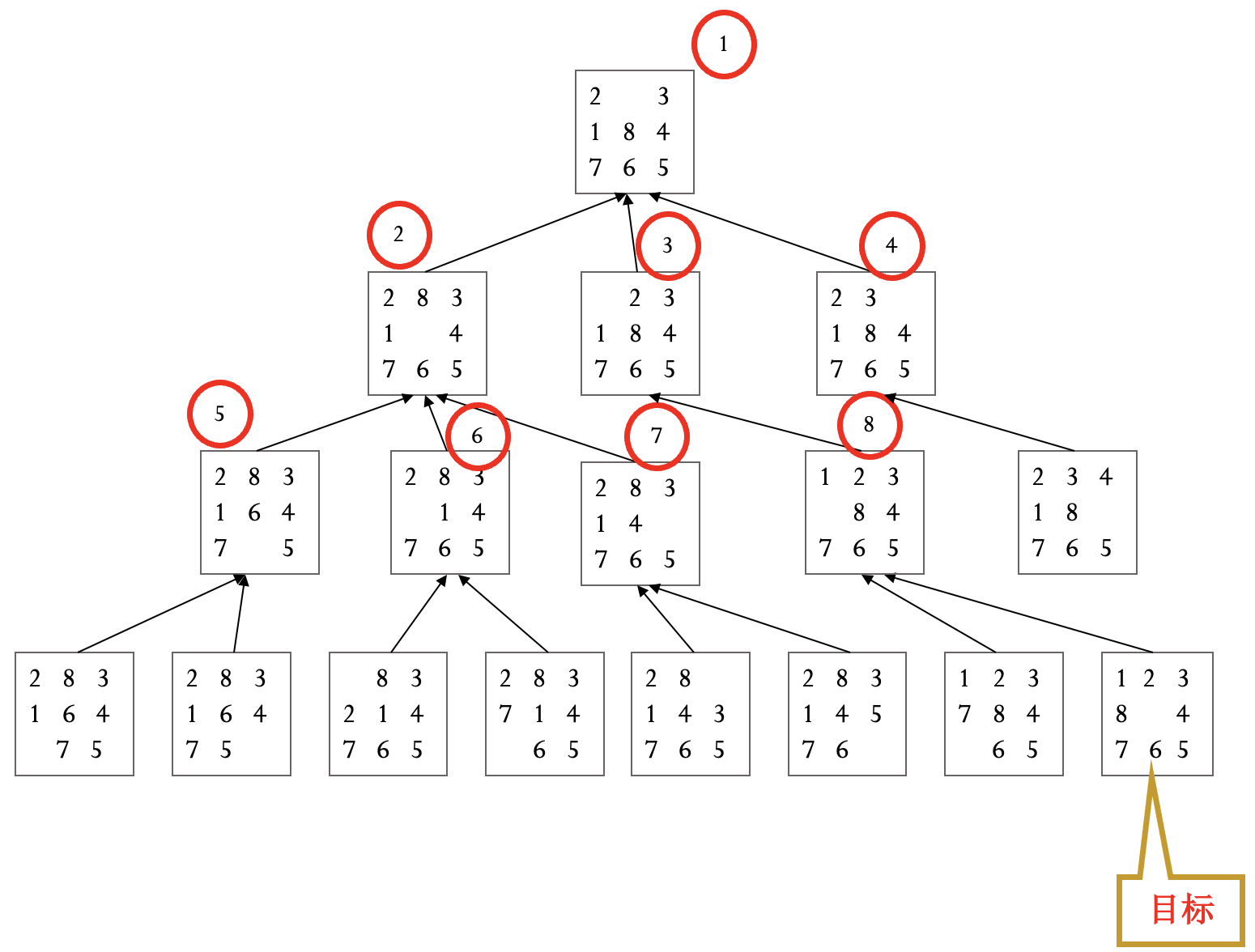
例(八数码问题) 定义 $g(n)$ 为到当前节点的耗散值, $h(n)$ 为当前节点不在位的将牌数.
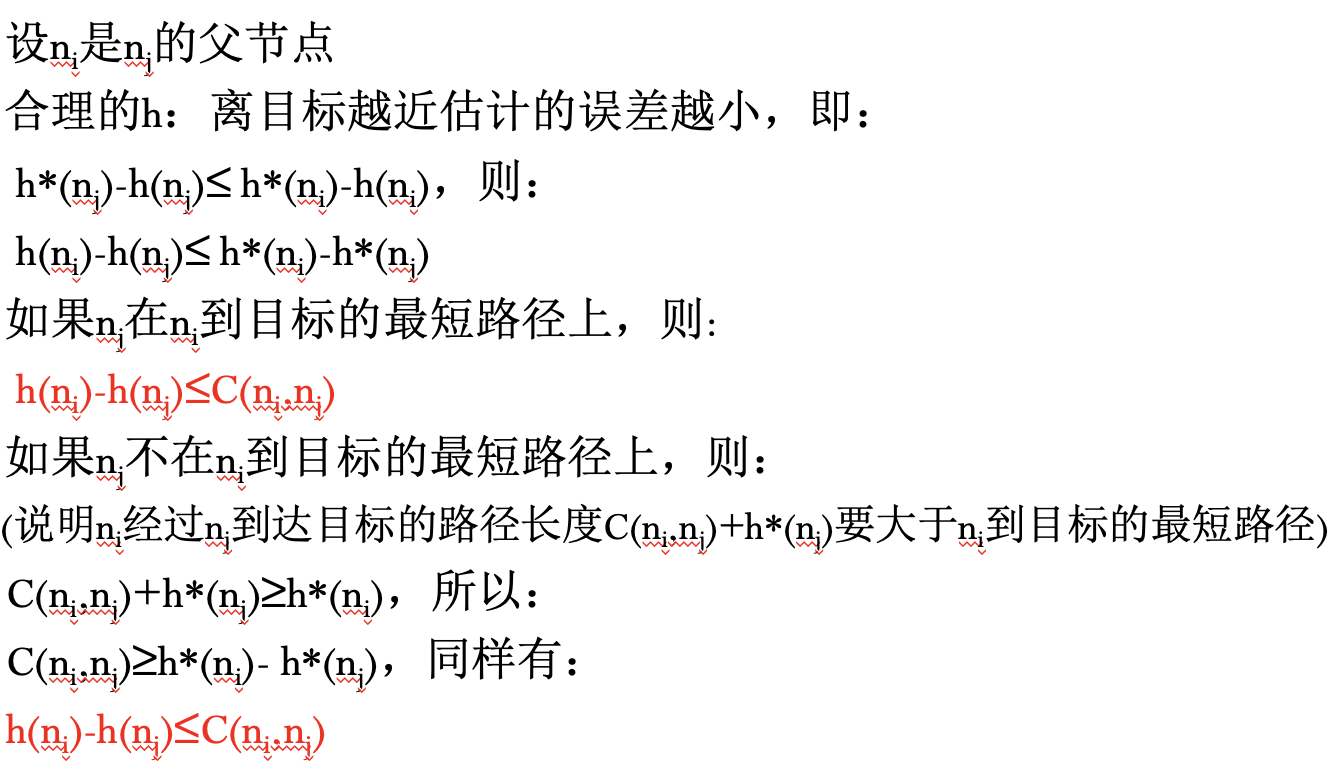
最佳图搜索算法 A*:
在 A 算法中, 如果满足条件:
则 A 算法称为 A* 算法.
例(八数码问题) 定义 $h_1(n)$ 为当前节点不在位的将牌数, $h_2(n)$ 为当前节点将牌不在位的距离和, 注意到这两种定义均满足 A* 算法的条件.
选取 $h$ 的一般原则: 放宽限制条件, 在宽条件下给出估计函数.
定理 1 若存在从初始节点 $s$ 到目标节点 $t$ 有路径, 则 A* 必能找到最佳解结束.
定理 2 对同一问题定义两个 A* 算法 A$_1$ 和 A$_2$, 若 A$_2$ 比 A$_1$ 有较多的启发信息, 即对所有非目标节点有 $h_2(n)>h_1(n)$, 则在具有一条从 $s$ 到 $t$ 的路径的隐含图上, 搜索结束时由 A$_2$ 所扩展的每一个节点, 也必定由 A$_1$ 所扩展, 即 A$_1$ 扩展的节点数 $\ge$ A$_2$ 扩展的节点数 (估计更准确).
- 上述评价指标是 “扩展的节点数”, 同一个节点只计算一次.
- 为什么条件不能是 $h_2(n)\ge h_1(n)$? 什么情况下会出现问题? 能否给定理再增加条件, 使得定理在 $h_2(n)\ge h_1(n)$ 条件下也成立?
- 提示: 考虑那些 $f(n)=f^*(t)$ 的节点, $t$ 为目标节点. 如果不考虑这样的节点, 等号可以加上.
对 $h$ 的评价方法: 设共扩展了 $d$ 层节点, 共搜索了 $N$ 个节点, 计算得平均分叉数 $b^*$.
$b^*$ 越小, 说明 $h$ 效果越好. $b^*$ 是较稳定的常数, 基本不随问题规模变化.
A* 算法的改进:
因 A 算法对 $m_l$ 类节点可能要重新放回到 OPEN 表中, 因此可能会导致多次重复扩展同一个节点, 导致搜索效率下降.
扩展未找到初始节点到当前节点的最短路径; 距离越近, 估计应越准.
对 $h$ 加以限制: 第一次扩展节点时, 就找到了从 $s$ 到该节点的最短路径.
此时称 $h$ 是单调的.
定理 若 $h(n)$ 是单调的, 则 A* 扩展了节点 $n$ 之后, 就已经找到了到达节点 $n$ 的最佳路径. 即当 A* 选 $n$ 扩展时, 有 $g(n)=g^*(n)$.
定理 当 $h(n)$ 满足单调条件时, 一定满足 A* 条件.
对算法加以改进: 避免或减少节点的多次扩展.
- 定理 OPEN 表上任以具有 $f(n)<f^*(s)$ 的节点定会被 A* 扩展.
- 定理 A* 选作扩展的任一节点, 定有 $f(n)\le f^*(s)$.
定理 当 $h(n)$ 恒等于 0 时, $h$ 为单调的.
# Modified-A-algorithm(s): s 为初始节点 OPEN=(s), CLOSED=(), f(s)=g(s)+h(s), f_m=0; while OPEN 不空 do: begin NEST={n_i|f(n_i)<f_m,ni->OPEN} if NEST≠( ) then n=NEST 中 g 最小的节点 else n=FIRST(OPEN), f_m=f(n); if GOAL(n) THEN return n; REMOVE(n, OPEN), ADD(n, CLOSED); EXPAND(n →{mi}, 计算 f(n, m_i)=g(n, m_i)+h(m_i); ADD(m_j, OPEN), 标记 m_j 到 n 的指针; if f(n, m_k)<f(m_k) then f(m_k)=f(n, m_k), 标记 m_k 到 n 的指针; if f(n, m_l)<f(m_l) then f(m_l)=f(n, m_l), 标记 m_l 到 n 的指针, ADD(m_l, OPEN); OPEN 中的节点按 f 值从小到大排序; end while return FAIL;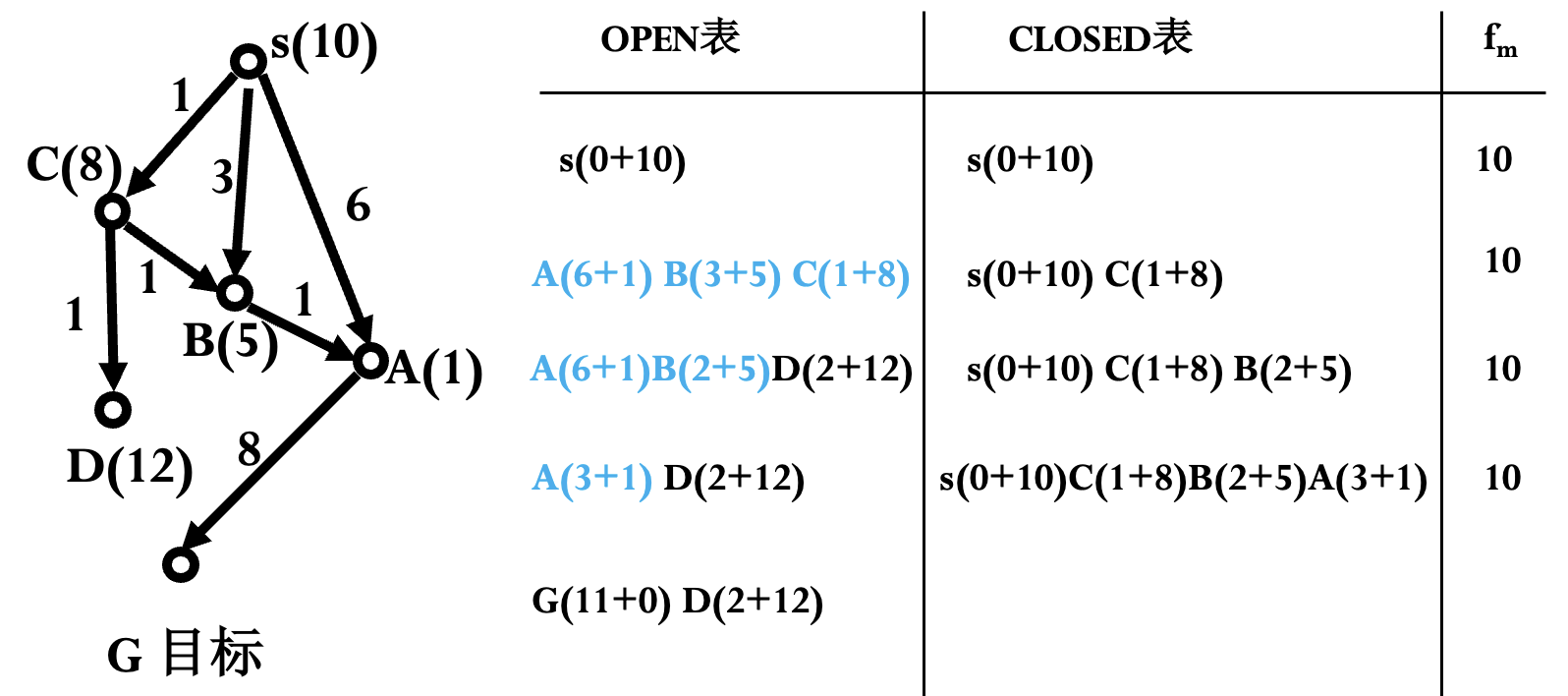
其他的搜索算法
局部搜索算法: 爬山法.
随机搜索算法.
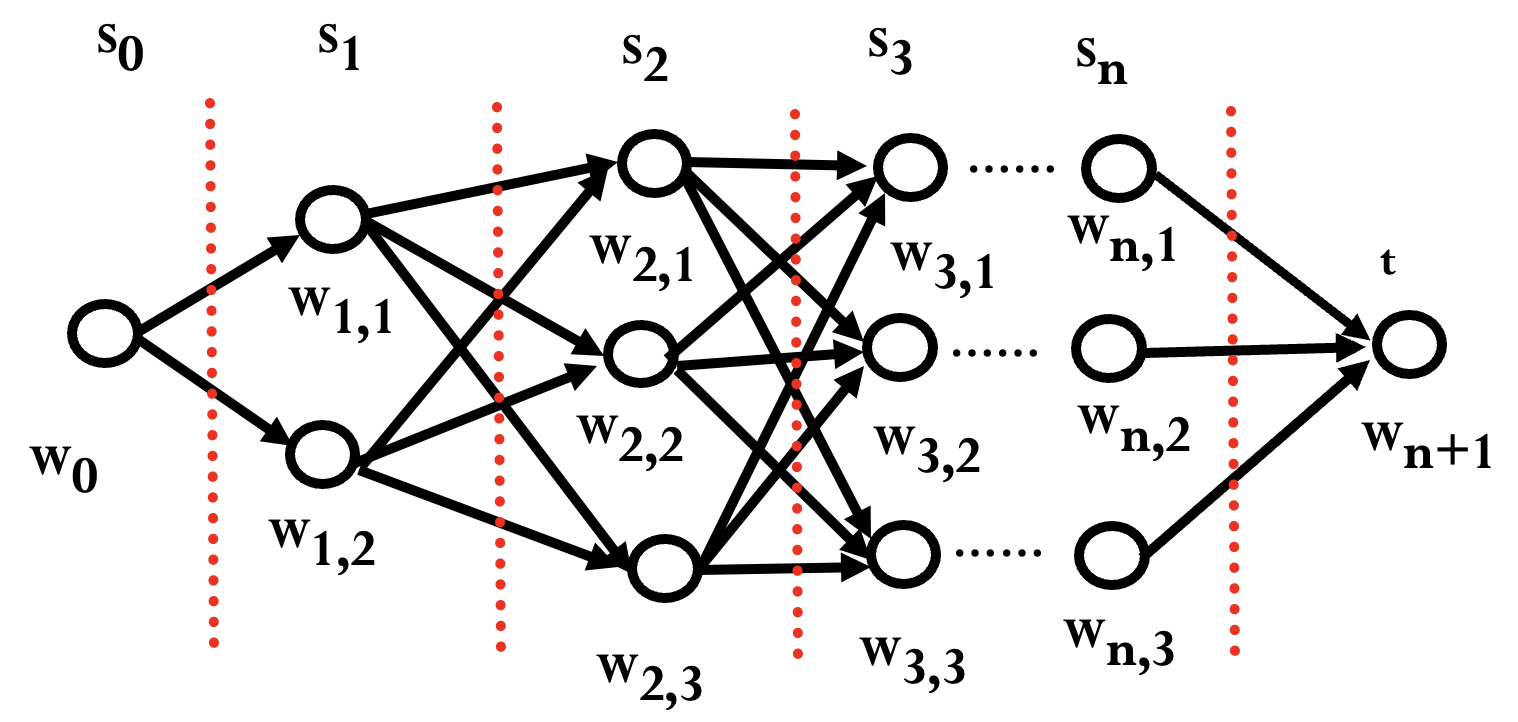
动态规划算法 (当 $\forall\,n$, 有 $h(n)=0$, A* 算法即为动态规划): viterbi 算法.
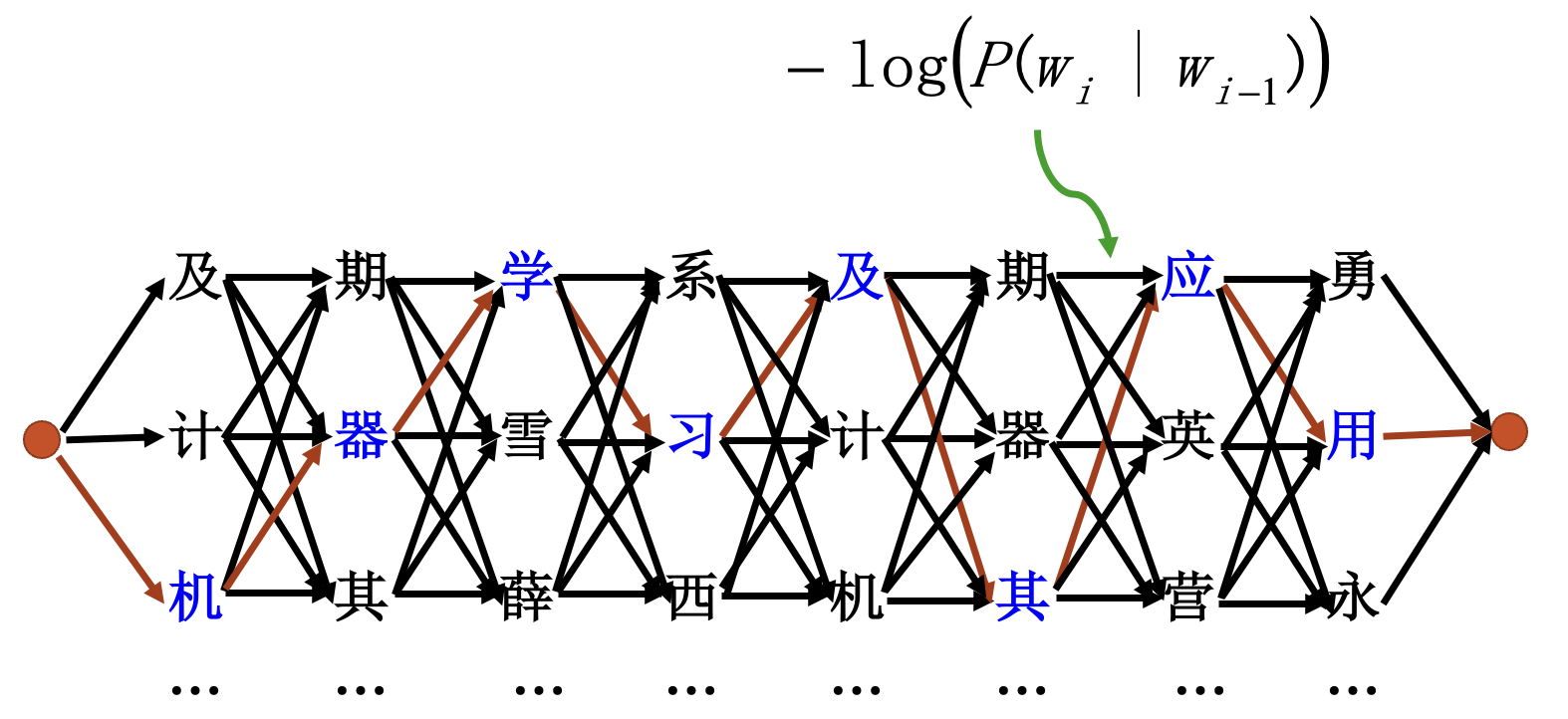
搜索算法实用举例
拼音输入法:
二元语法时:
需要求
对应的句子.